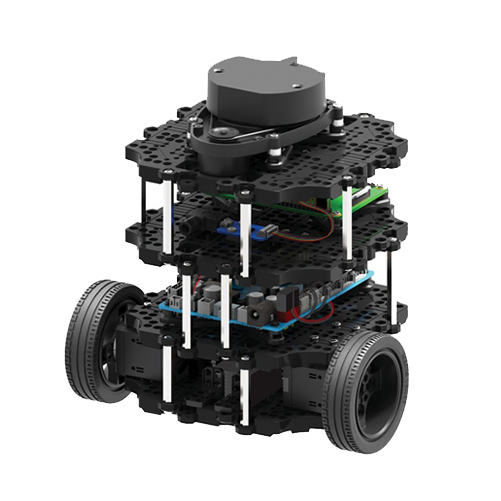
多功能式移动抓取平台
型号:Turtlebot3-Labox
Turtlebot3是上一代ROS官方标准平台机器人。它小巧、低成本、可编程且基于ROS,其目的是用于教育、科研及作为机器人爱好者的产品原型。Turtlebot3在Turtlebot2的基础上,保障其功能性和产品品质,并缩小平台的尺寸且大幅降低价格,同时将机器人组件根据用户的需求更改并支持扩展。根据用户如何选择部件,如机械部件、计算机和传感器,Turtlebot3可以通过各种方法进行定制。此外Turtlebot3采用了比现有的PC更经济、更小巧,并且适合嵌入式系统的SBC(单板计算机),还应用了距离传感器和3D打印等最新技术。
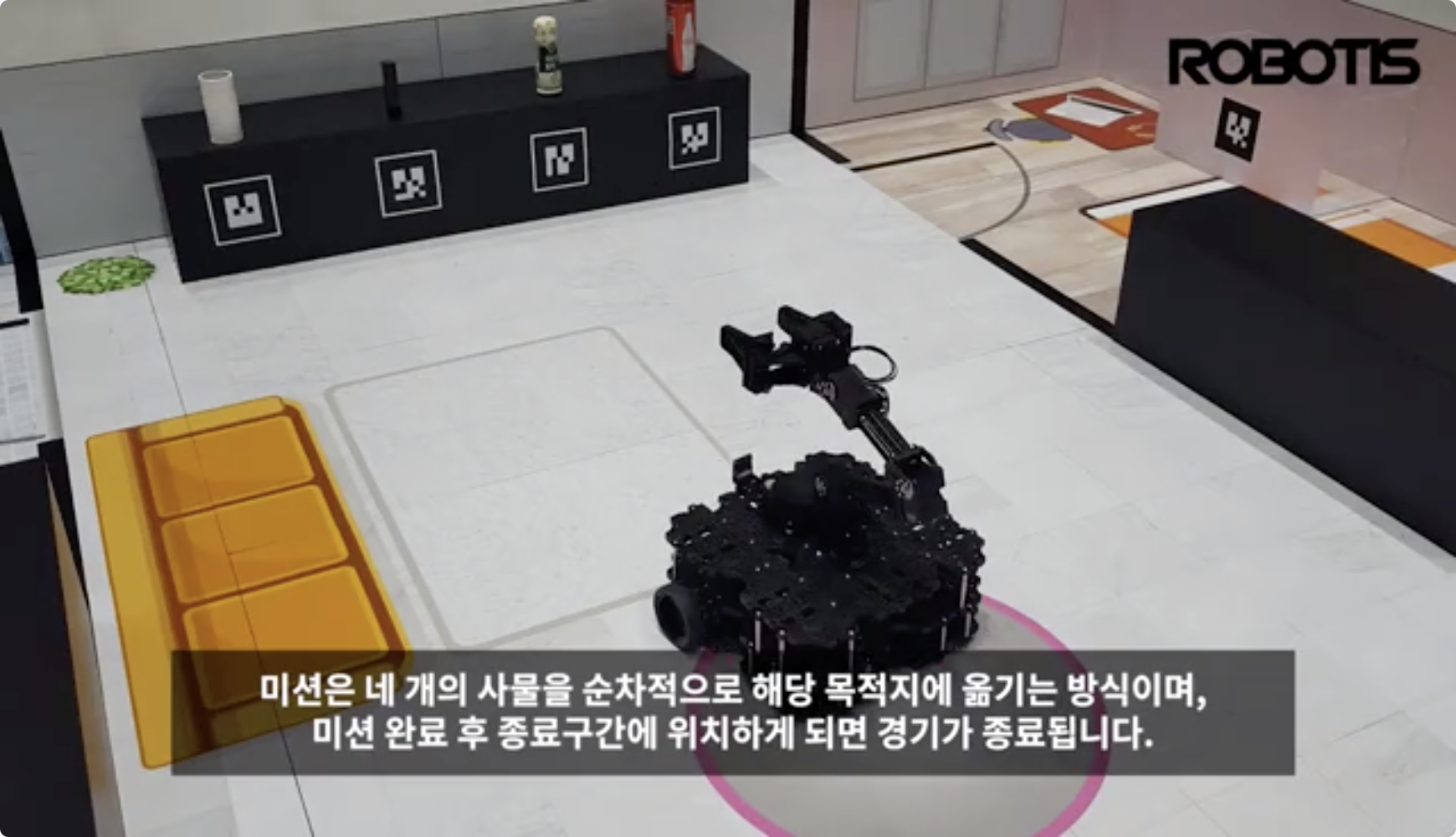
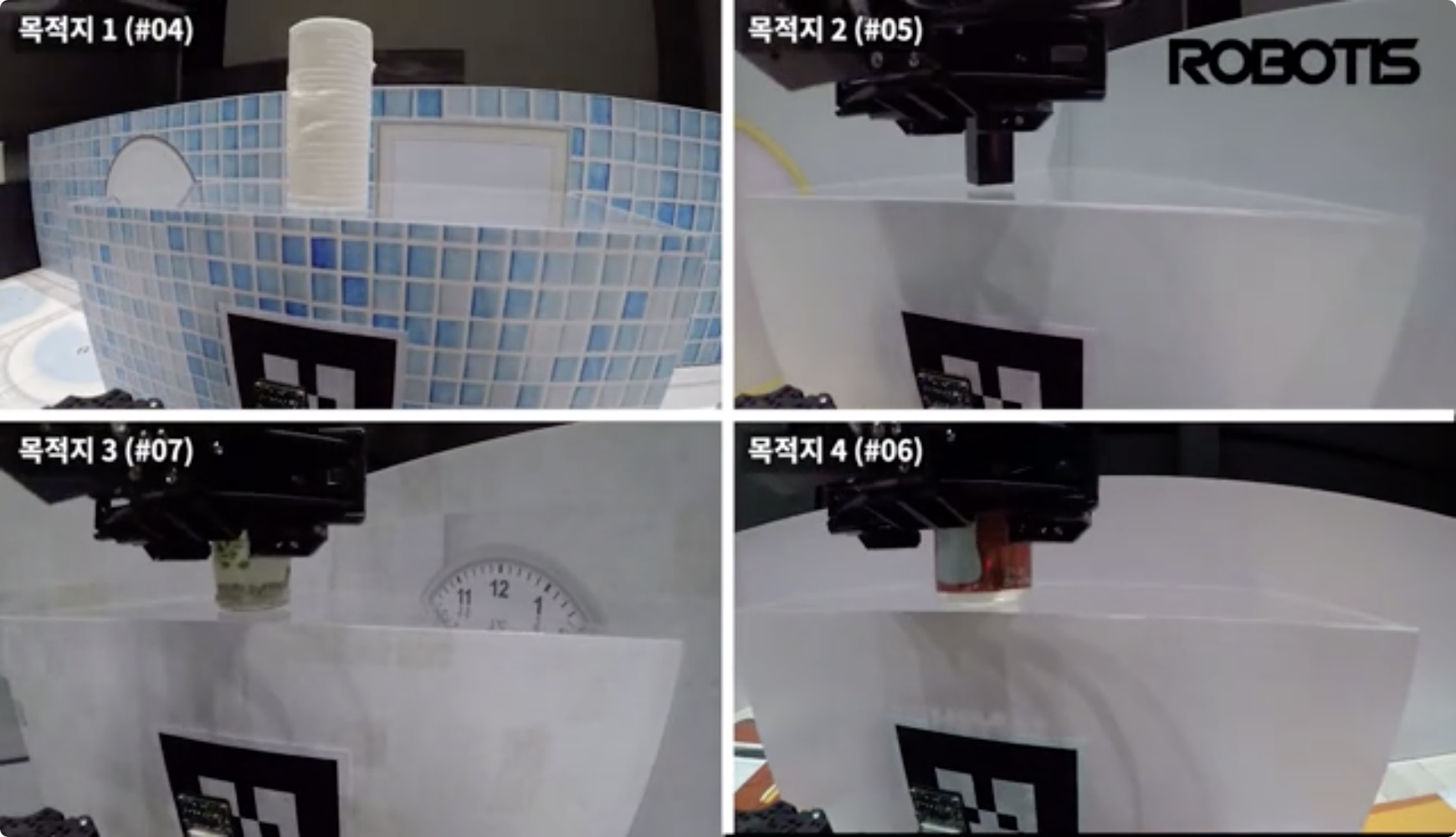
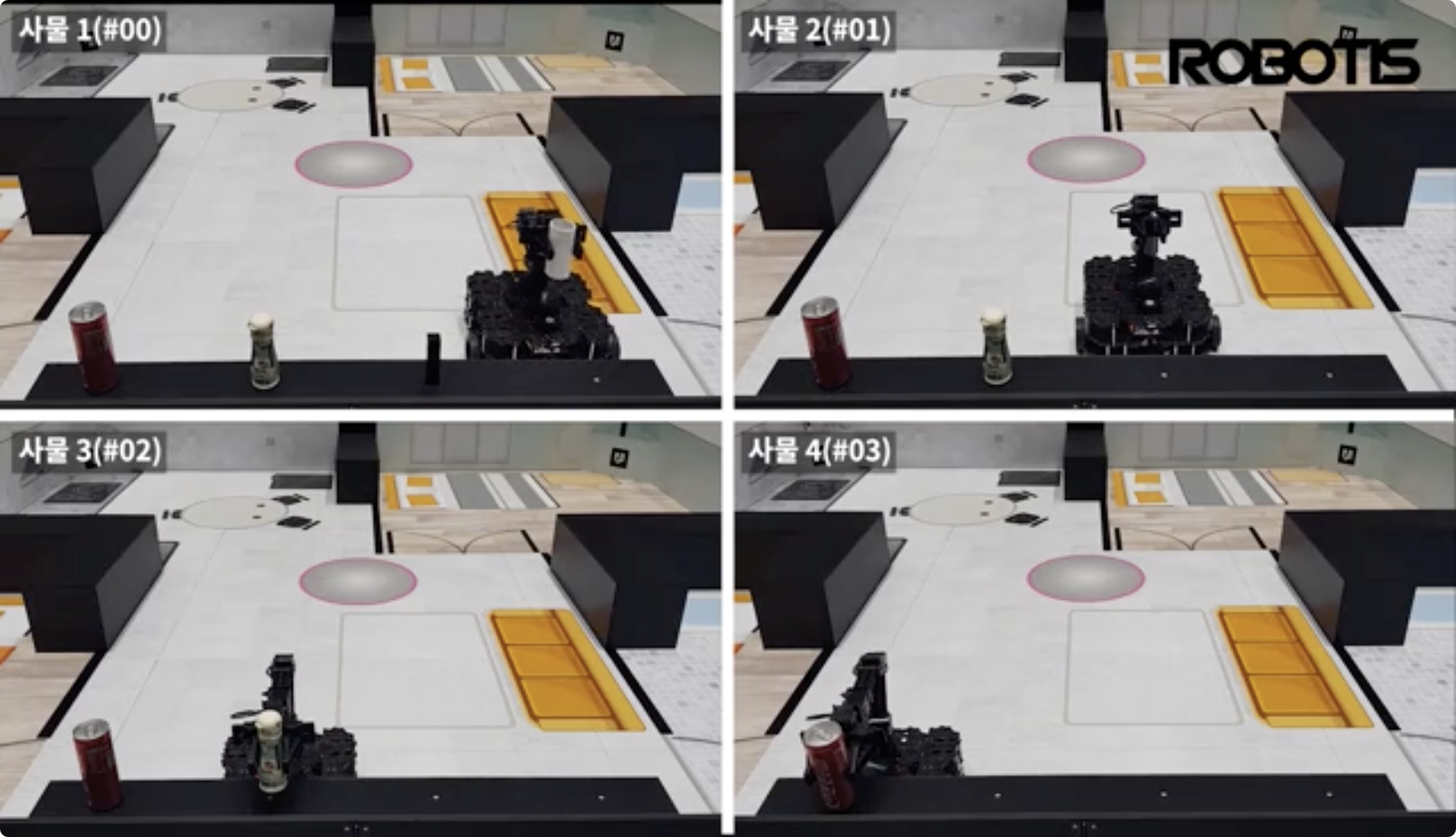
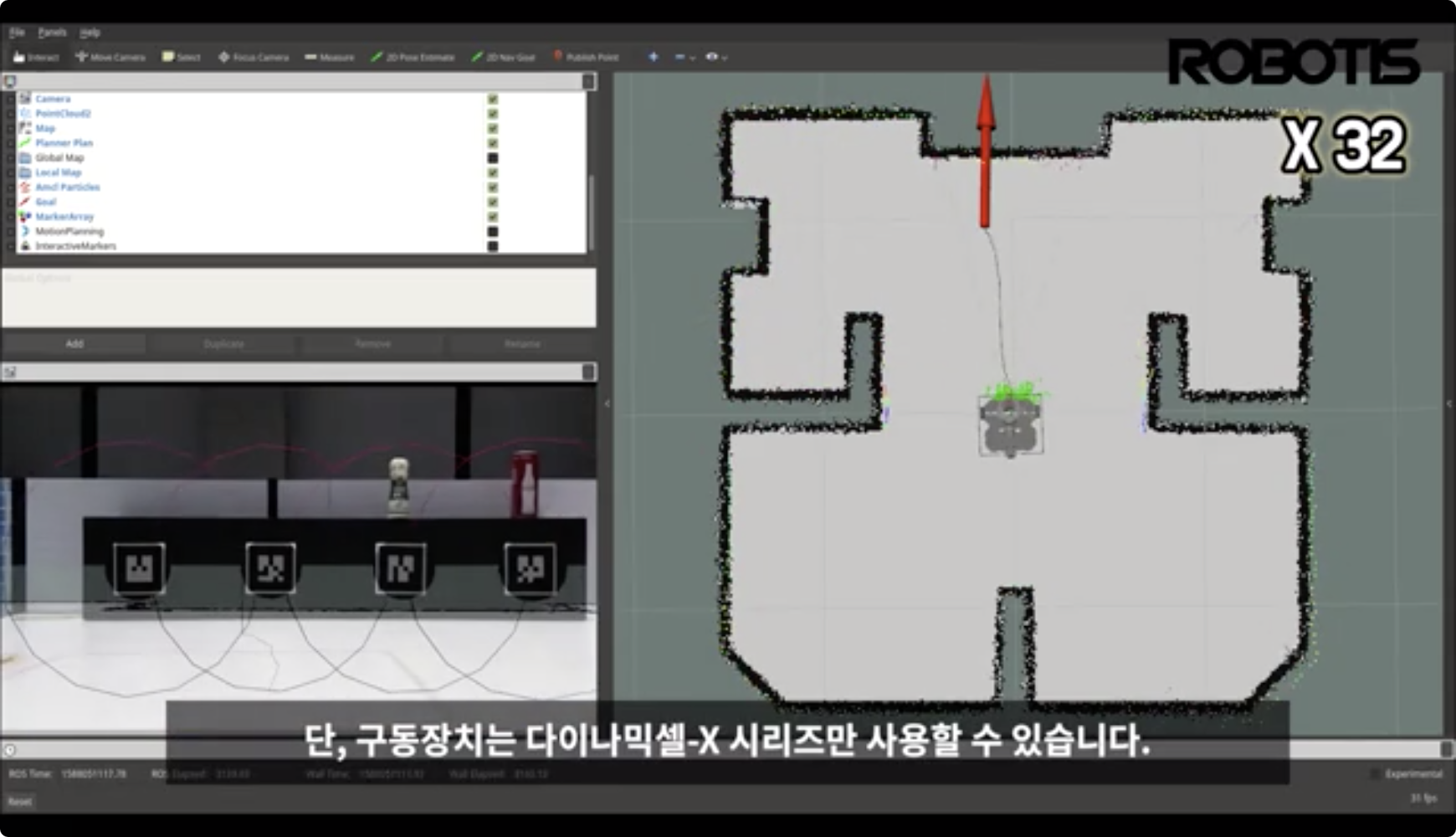
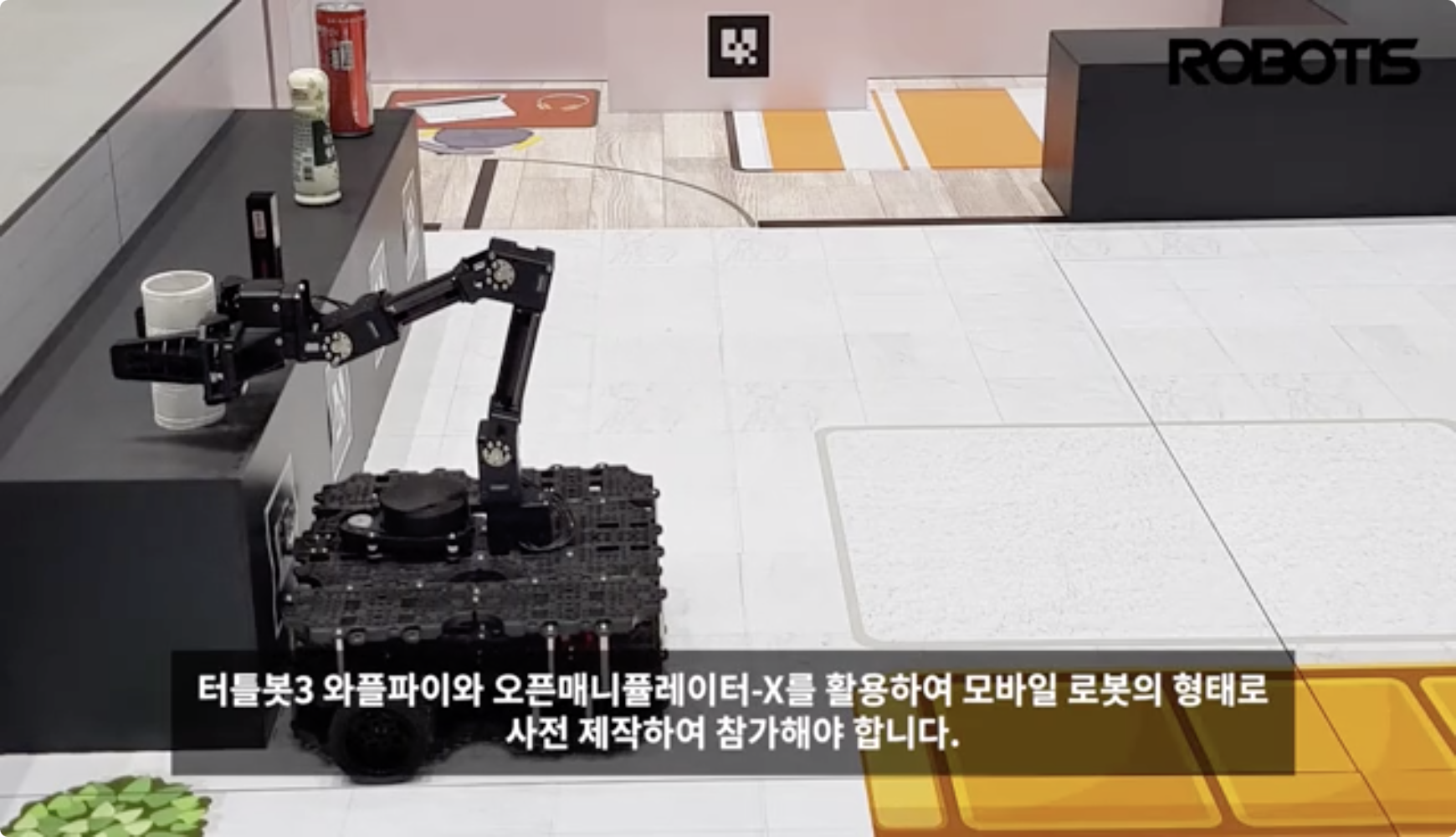
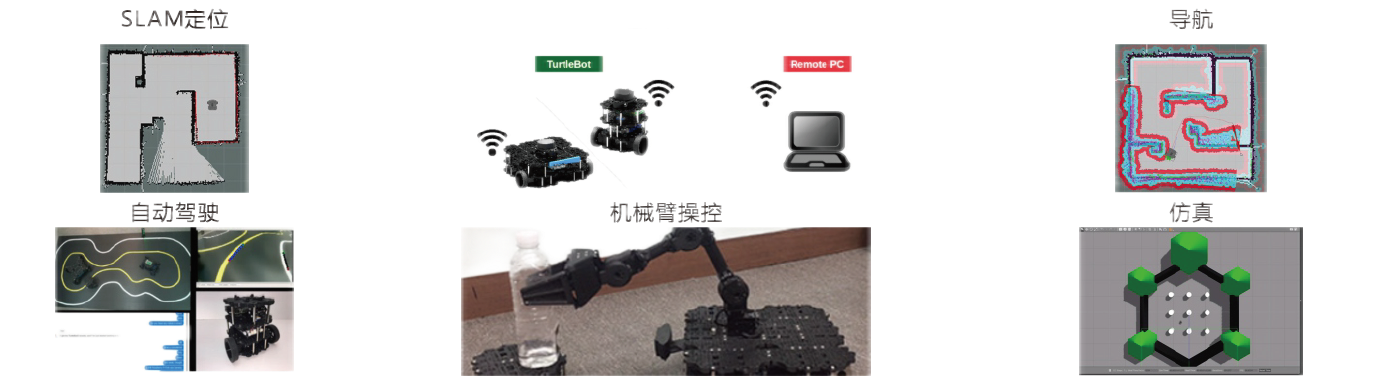
Turtlebot3-Labox集成了机械臂和移动底盘,是一套为人工智能和机器人学科教学实验而设计的解决方案。它的集成部件相对于Turtlebot3更丰富,包含了GPU,激光雷达,相机,IMU,GPS融合北斗高精度定位系统等。是可实现移动、抓取、SLAM、视觉识别、定位功能,实现移动抓取功能机器人平台。

特征
-
Labox+控制层
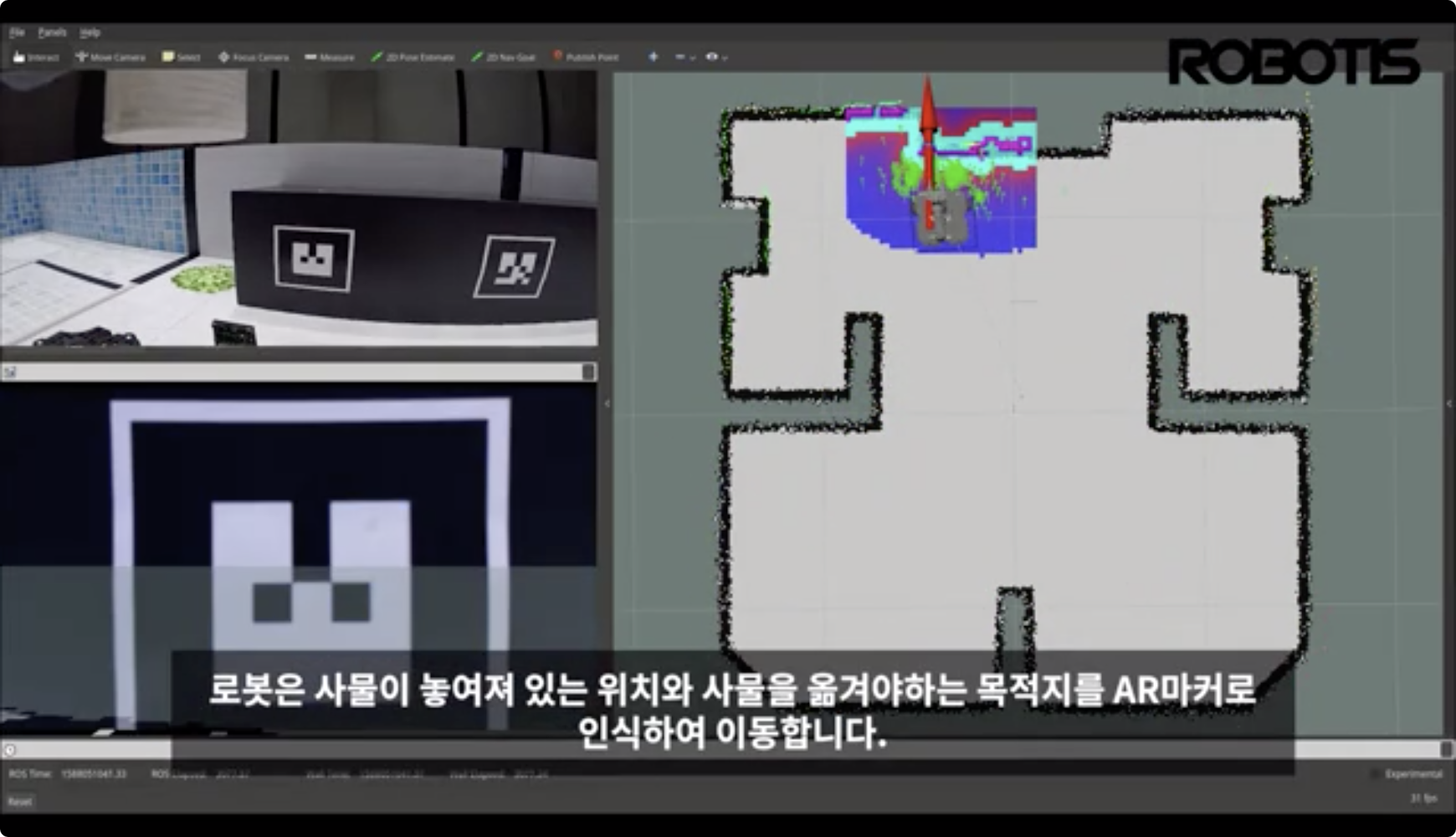
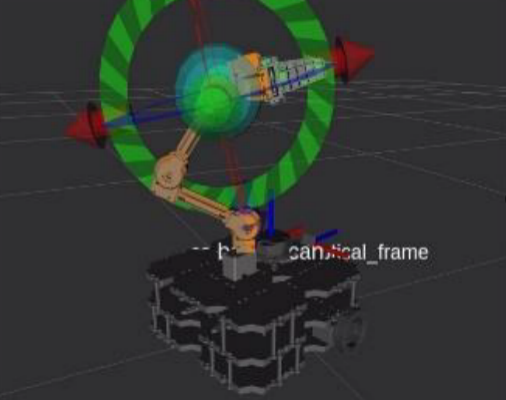
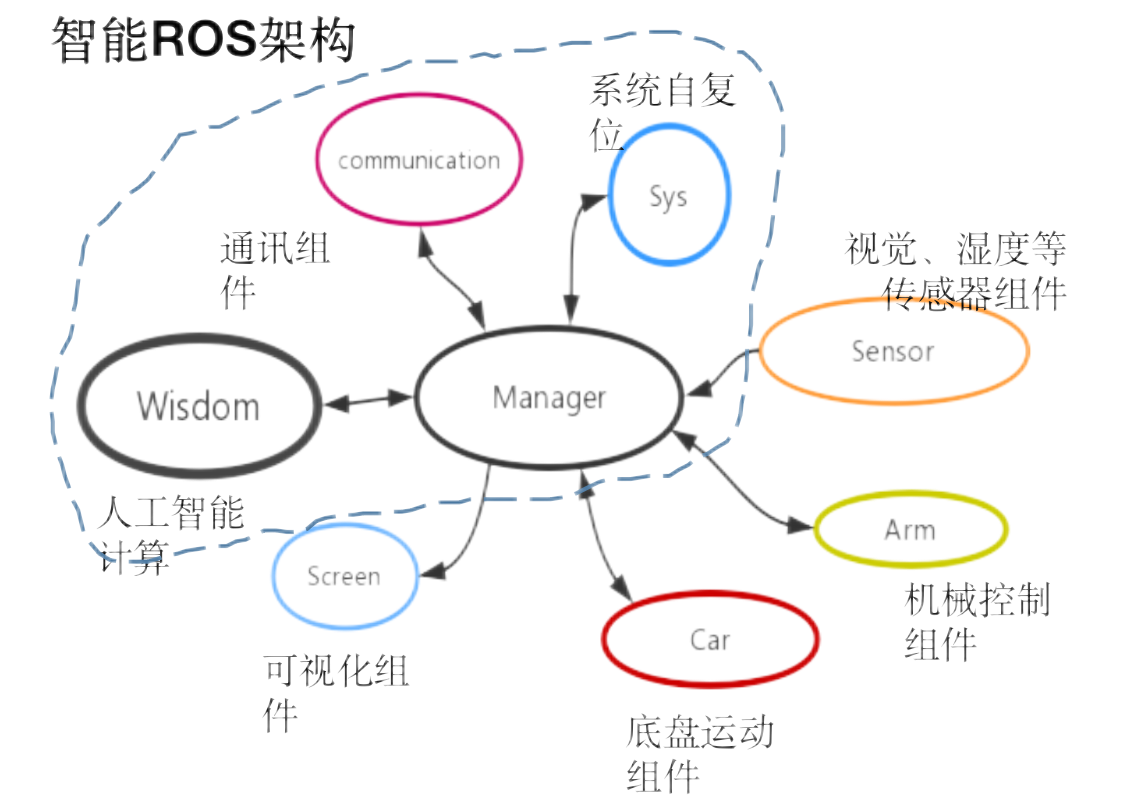
包含有轮式移动和机械臂操作两部分,TB3和Arm使LABOX更具有了自主定位与地图构建、定位导航、机械臂操作等丰富的功能,完成决策层发布的多样化任务。
-
Labox+决策层
采用树莓派3B+作为处理器,拥有更强的CPU性能以及更强的无线。内存1GB,雷达A1满足智能机器人的机器视觉、地图构建、定位、导航规划等任务的实时运算。
-
Labox+感知层
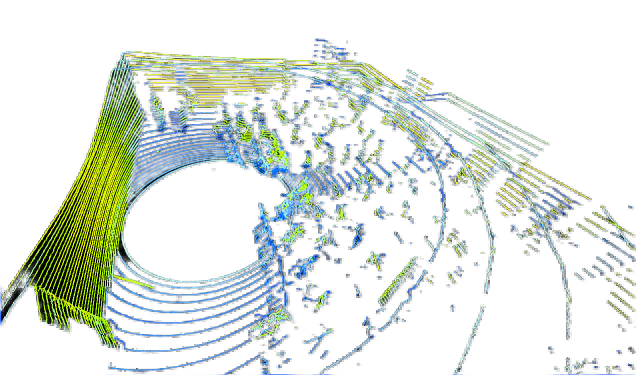
集成了TB3移动机器人的激光雷达,单目相机,IMU,里程计等感知模块,可分别获得环境的距离信息、图像信息、全球绝对位置和自身相对位置信息。
-
Labox+感知、规划、控制一体
Labox是一套为人工智能和机器人学科教学实验而设计的解决方案。集移动、抓取、SLAM视觉识别、定位功能为一体,实现移动抓取功能的机器人平台
技术指标
TurtleBot 3有三款型号,分别是TurtleBot 3-Burger,TurtleBot 3-Waffle Pi和TurtleBot 3-Labox。它们的相同点是都采用伸缩型的框架结构,以基于Arduino的OpenCR为驱动板,采用性能强悍的树莓派3单板计算机,搭载360°激光雷达、9轴惯性测量单元,配合高精的Dynamixel舵机。
但TurtleBot 3-Waffle Pi使用更多的孔状面板增加承重面积,采用了更加稳定好用超大扭矩的Dynamixel舵机,增加了树莓派相机(Raspberry Pi Camera Module v2.1)能够进行物品的识别、跟踪。
 TurtleBot 3 Burger |  |  TurtleBot 3 Waffle Pi |
138 x 178 x 192 mm | 尺寸 | 281 x 306 x 141 mm |
1.0 kg | 重量 | 1.8 kg |
0.22 m/s | 最大速度 | 0.26 m/s |
15 kg - Default | 最大承重 | 30 kg - Default |
2.0 hrs (load dependent) | 运行时间 | 2.5 hrs (load dependent) |
No | 相机 | Raspberry Pi Camera |
RPLIDAR-A1 | 激光雷达 | RPLIDAR-A1 |
No | 蓝牙手柄 | Yes |
No | UI交互面板 | No |
No | 充电桩 | No |
ROS 1 | Software | ROS 1 |
Raspberry Pi 3B (1 GB) | Computer | Raspberry Pi 3B (1 GB) |

配件
配件说明文字内容

配件
配件说明文字内容

配件
配件说明文字内容

配件
配件说明文字内容
- 集成方案1
- 集成方案2
- 集成方案3
- 集成方案4
- 集成方案5

- STARTER PACKAGE
- EXAMPLE APPLICATIONS
- INCLUDED ACCESSORIES
- FEATURED UPGRADES

- EXPLORER PACKAGE
- EXAMPLE APPLICATIONS
- INCLUDED ACCESSORIES
- FEATURED UPGRADES

- EXPLORER PRO PACKAGE
- EXAMPLE APPLICATIONS
- INCLUDED ACCESSORIES
- FEATURED UPGRADES
- MAPPING PACKAGE
- EXAMPLE APPLICATIONS
- INCLUDED ACCESSORIES
- FEATURED UPGRADES
- HUSKY MANIPULATION
- EXAMPLE APPLICATIONS
- INCLUDED ACCESSORIES
- FEATURED UPGRADES